
遥瞰寰宇,感知天地。实验室主要从事与光学遥感、合成孔径雷达(SAR)及红外成像场景仿真,目标检测识别及空天态势感知等领域的基础理论及应用研究。 近年来,团队在该领域承担和完成包括国家自然科学基金、863计划、**预研、预研基金、航空基金、教育部博士点基金、中科院国防创新基金等在内的多项基础研究课题,以及航天科工、航天科技相关院所合作项目。发表高水平学术论文百余篇,授权发明专利60余件,软件著作权登记10余件。经过近20年的发展和技术积累,取得了一系列重要研究进展和创新研究成果。作为牵头单位,获教育部科技进步(专项)二等奖1项。涉及研究包括:
• 多时相遥感图像配准及变化检测
• 天基红外成像虚警源建模与抑制
• 天基下视极微弱目标检测与识别
• 无人机遥感图像处理与场景感知
• LiDAR点云数据处理与场景重建
依托承担项目,团队有针对性地开发了一系列原型算法,研制开发了多套星载、地面集成验证系统,并服务于我国在役航天装备。
一、红外图像处理与目标检测集成验证系统
主要围绕红外图像增强、红外弱小目标检测、识别与跟踪开展算法仿真、性能评估及验证。该集成验证系统集成了100余种主流算法,形成了便于移植的多功能算法模块。

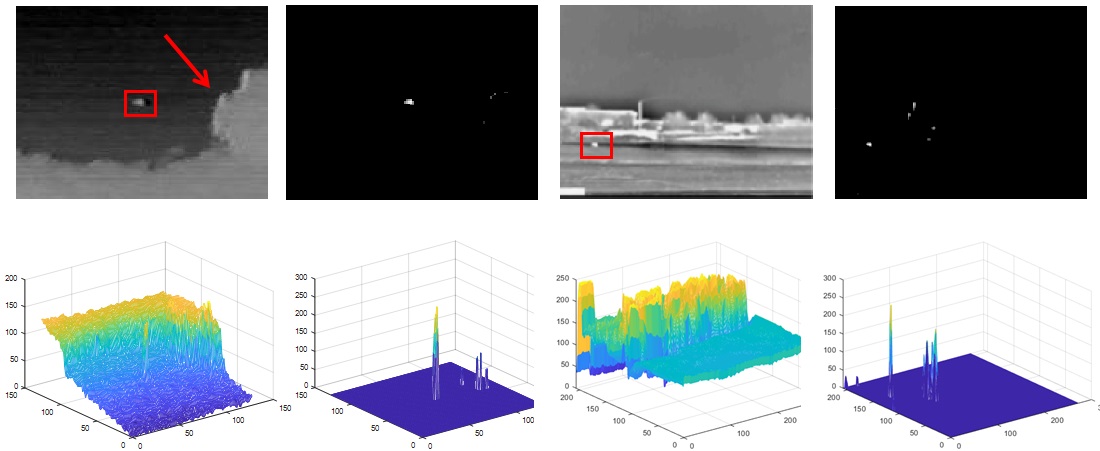
图1 红外图像处理算法及集成验证系统
二、 遥感SAR图像处理及自动目标识别
基于SAR图像的处理分析与智能解译,特定目标的检测与自动目标识别(ATR)技术等,主要包括复杂场景下的港口、舰船、岛屿、桥梁、油库、水坝、机场等智能检测与识别。

图2 SAR影像(左)及自行开发的SAR图像频谱特征分析与可视化软件系统(右)
三、LiDAR与视觉信息融合的复杂场景感知
在四川省自然科学基金、基础研究及相关企业合作项目的支持下,开展了点云数据处理、点云与视觉信息标定及融合、场景重建、行人及车辆检测等驾驶环境感知关键技术研究,研发了相关的算法模块,取得了一定的研究进展。



车辆检测与跟踪 车道检测 语义分割



3D重建及目标检测 道面及实例分割 立体视觉
图3 驾驶环境感知
主要成员:彭真明教授、杨春平高工、罗俊海副教授、何艳敏副教授、陶冰洁副教授、蒲恬高工等。